3 Common Kinematic Chain Applications in a Modern Manufacturing Environment

As a follow up to Control The Kinematic Chain, Control The Industrial Robot, here are some standard applications we could find in a modern manufacturing environment.
I inserted XYZ compasses into each picture in order to highlight the kinematic chain of the robot. Each compass is a degree of freedom for that kinematic chain, with on final compass representing the TCP tool center point. The goal is to simplify in our brain the the joints that build up the chain, without focusing on the complexity of what is potentially happening in the manufacturing cell. (The compasses might be hard to see, zoom in!)
Note: Remember a robot pose can be determined by 1 of 2 ways. Either by inversely calculating the value from the TCP back to the base frame, for each of the joints in the kinematic chain known as IK linear programming, or via forward kinematics, which is simply driving each joint to a position within its own range.
Instead of looking at a complex industrial automation application, we should start by visualizing a kinematic chain with a tool. Yes I am oversimplifying, if you say ok well how does the controller work, what i/o drives the tool, does the tool have its own kinematics, etc those are topics for later.
Instead I am trying to highlight the basic properties of driving the kinematic chain of a industrial robot, which therefor will locate the tool / TCP where we want it.
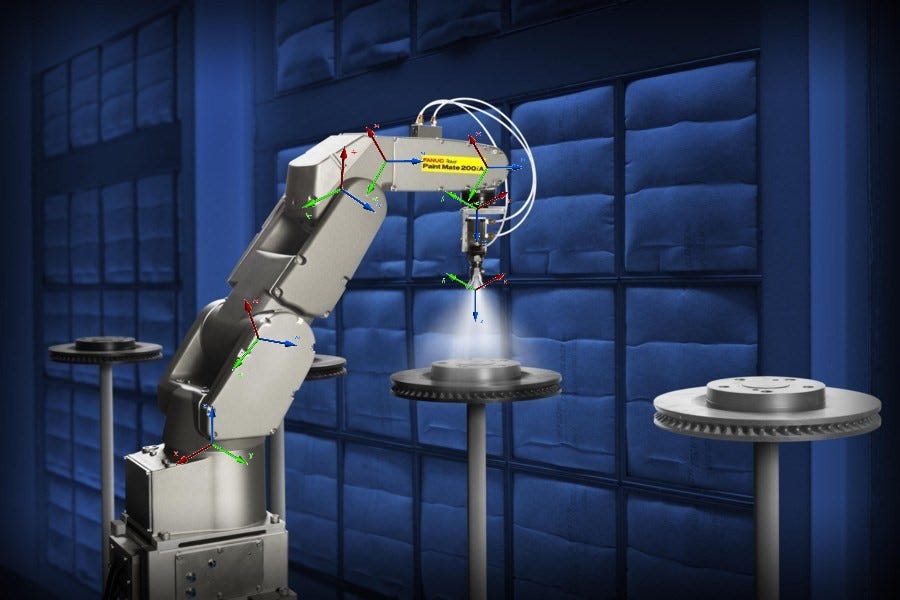
Painting Robot Kinematic Chain
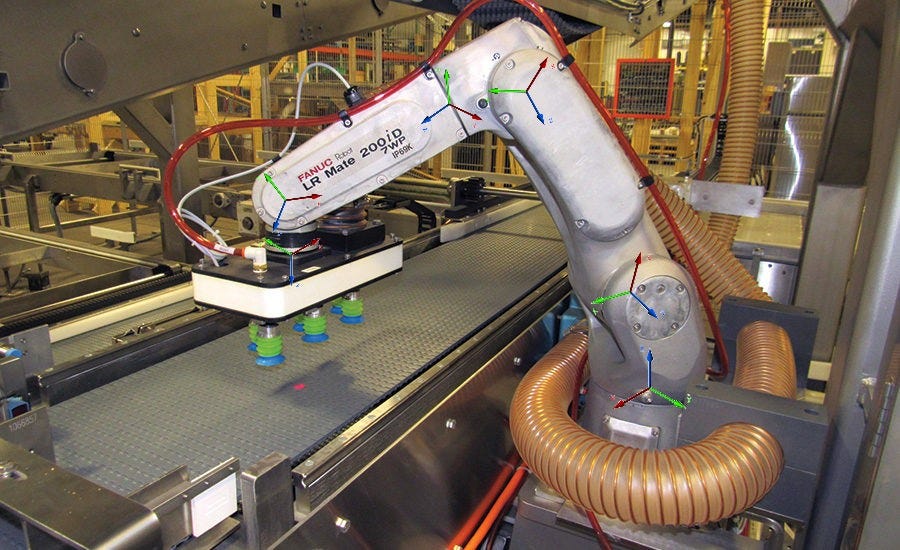
Grabbing / Pick and Place Robot Kinematic Chain
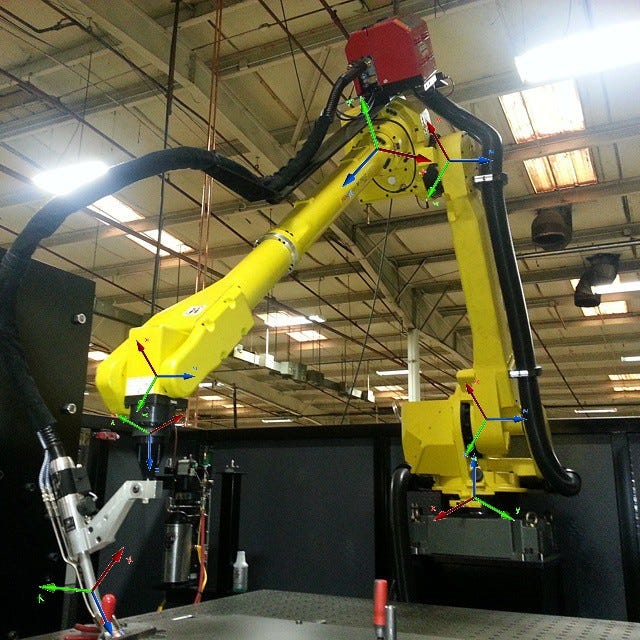
Welding Robot Kinematic Chain